За последние десять лет робототехники разработали все более сложные робототехнические системы, которые могли бы помочь людям выполнять различные задачи, как дома, так и в других условиях. Однако для того, чтобы помочь пользователям, эти системы должны быть в состоянии эффективно перемещаться и исследовать свое окружение, не сталкиваясь с другими объектами в непосредственной близости от них.
Хотя в настоящее время существует целый ряд навигационных систем и методов, мобильность большинства роботов все еще довольно ограничена, особенно в неизвестных и не нанесенных на карту средах. Большинство существующих методов навигации имеют два основных компонента: один предназначен для построения карты, которую робот может использовать в качестве эталона (например, методы одновременной локализации и картографирования), а другой-для создания свободных от столкновений или оптимальных путей для робота (например, вероятностные дорожные карты или быстрое исследование случайных деревьев).
Хотя некоторые из этих методов достигли многообещающих результатов, они, как правило, очень чувствительны к шуму, улавливаемому датчиками робота. В результате они часто сильно полагаются на карты и плохо работают в динамичных или быстро меняющихся средах. Основанные на глубоком обучении навигационные подходы, которые не опираются на карты, в конечном счете могут помочь преодолеть ограничения этих систем.
Исследователи из Нанкинского университета аэронавтики и астронавтики и Национального университета оборонных технологий Китая недавно разработали новую систему, которая могла бы обеспечить более эффективную навигацию роботов в закрытых помещениях. Вместо того чтобы полагаться на заранее определенные карты, эта система использует обучающий подход, известный как генеративное имитационное обучение, позволяя роботам ориентироваться в окружающей среде и выполнять свои цели.
"Наш метод использует многовидовое наблюдение за роботом и целью в качестве входных данных на каждом временном шаге, чтобы обеспечить последовательность действий, которые перемещают робота к цели, не полагаясь на одометрию или GPS во время выполнения",-пишут исследователи в своей статье.
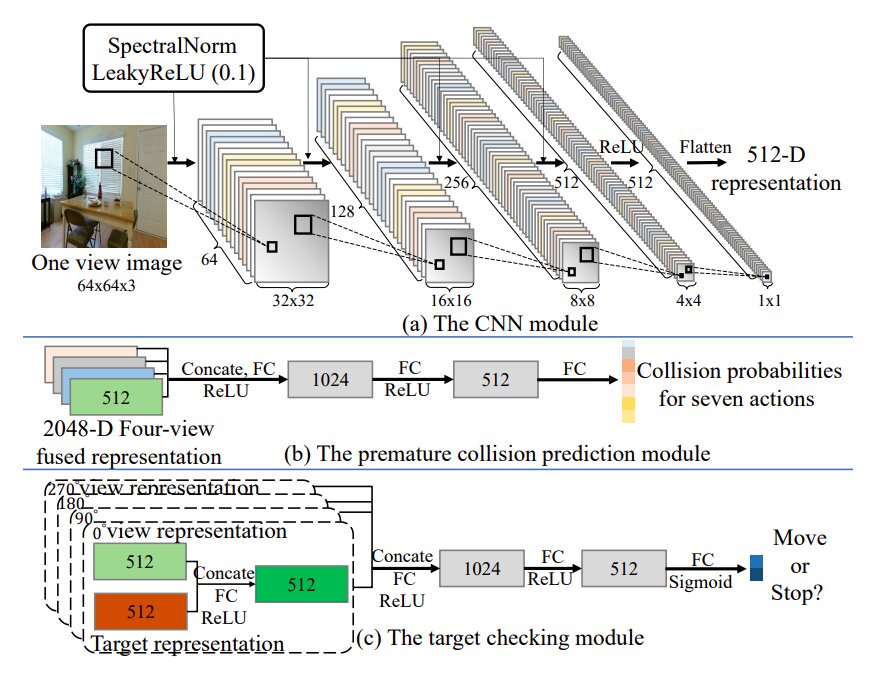
Навигационная система, разработанная исследователями, состоит из трех ключевых компонентов. Первый-вариационный генеративный модуль, обученный на человеческих демонстрациях, который предназначен для прогнозирования изменений в окружающей среде до того, как робот начнет планировать свои действия.
Второй компонент предсказывает статические столкновения, повышая безопасность навигации робота. Наконец, модуль проверки цели рассматривает конечное действие или цель, которую пытается достичь робот, используя эту информацию для разработки более эффективных навигационных политик.
"Все три предложенные конструкции способствуют повышению эффективности обучающих данных, статическому предотвращению столкновений и производительности обобщения навигации, что приводит к созданию новой ориентированной на цель навигационной системы без картографирования",-пояснили исследователи в своей статье.
В будущем новая система, введенная исследовательской группой Нанкинского университета аэронавтики и астронавтики и Национального университета оборонных технологий, может быть использована для улучшения навигации других роботов, предназначенных для работы в домах людей, офисах или в других помещениях. Кроме того, результаты, достигнутые системой, могут вдохновить других исследователей на создание аналогичных инструментов для обеспечения более эффективной целевой навигации в роботах.
До сих пор навигационная система оценивалась в серии реальных экспериментов с использованием Turtlebot, недорогой роботизированной платформы, созданной двумя инженерами в Willow Garage. Результаты этих испытаний весьма многообещающи, так как система была легко интегрирована в робота и позволила ему более эффективно ориентироваться в закрытых помещениях. | |
| Просмотров: 464 | |