Обычные роботы, основанные на отдельных суставах, не всегда хорошо справляются со сложными реальными задачами, особенно с теми, которые связаны с ловким манипулированием объектами. Поэтому некоторые робототехники пытаются разработать континуальные роботы - роботизированные платформы, характеризующиеся бесконечным числом степеней свободы и отсутствием фиксированного количества суставов. В основе континуальных роботов обычно лежат кабели или другие деформируемые компоненты, которые могут двигаться более свободно и не ограничены фиксированными структурами суставов. Несмотря на эти преимущества, многие предложенные конструкции континуальных роботов все еще не могут эффективно ориентироваться в сложных и неструктурированных средах.
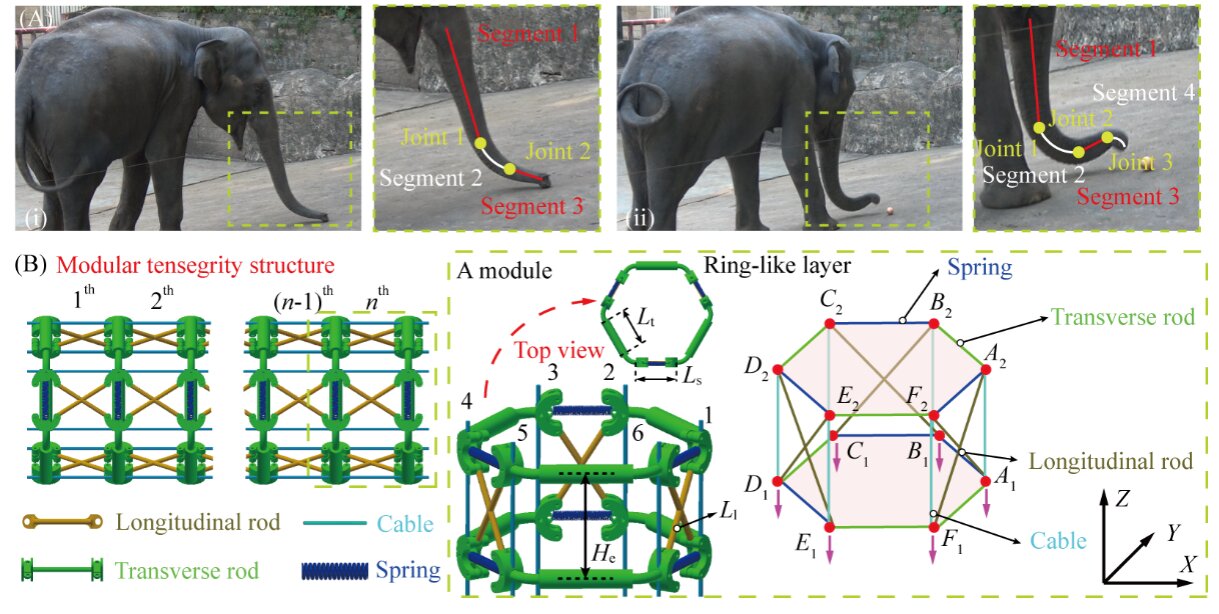
Исследователи из Университета Сунь Ятсена, Даляньского технологического университета и Лондонского университета Саут-Бэнк недавно разработали нового континуального робота, вдохновленного хоботами слонов. Этот робот, представленный в статье, опубликованной в журнале Soft Robotics, имеет настраиваемую конструкцию, которая позволяет адаптировать его для различных применений. "Мы обнаружили, что существующие роботы с тросовым приводом после деформации всегда демонстрируют профиль в форме круга, что может препятствовать их взаимодействию с окружающей средой различной кривизны", - рассказал Tech Xplore Цзянин Ву, один из исследователей, проводивших исследование. "Чтобы преодолеть это ограничение, мы попытались предложить континуальную парадигму роботов для адаптации к сценариям применения с различной кривизной". Хобот слона естественным образом разделен на конечные сегменты, соединенные псевдосуставами. Это позволяет слонам более эффективно взаимодействовать с неструктурированной средой, например, гибко протискивать хобот в узкие пространства или дотягиваться до более высоких ветвей. Благодаря своей уникальной конформации, жесткость различных сегментов хобота слона может регулироваться независимо и настраиваться на различные изгибы. Это в конечном итоге позволяет слону адаптировать форму хобота для решения различных задач и достижения объектов различной формы. "Вдохновленные движениями слоновьих хоботов, мы представили континуального робота с заранее запрограммированным распределением жесткости для решения проблемы робототехники, которую мы пытались решить", - пояснил Хайцзюнь Пэн, другой исследователь данного исследования. "Регулируя распределение жесткости, наш робот с биологическим вдохновением не только демонстрирует различные модели деформации, но и способен перемещаться по трубопроводам с различной кривизной". Робот, вдохновленный хоботом слона, созданный Ву и его коллегами, основан на структуре тенсегрити класса 3, состоящей из нескольких упругих элементов, которые равномерно распределены по всей структуре. Это позволило исследователям программировать локальные характеристики жесткости робота, просто заменяя упругие элементы другими, имеющими разную величину жесткости. "Используя разницу в распределении жесткости, континуальный робот демонстрирует различные роботизированные конфигурации при одинаковом критерии приведения в действие", - сказал Ву. "Наш биоинспирированный континуальный робот способен не только конформно взаимодействовать с окружением различной кривизны, но и упростить сложность необходимых систем приведения в действие и управления за счет использования присущего ему интеллекта". Исследователи уже использовали свою разработку для создания прототипа робота, состоящего из 12 эластичных модулей. Затем они продемонстрировали его деформационные возможности в серии испытаний, ориентированных на различные реальные сценарии. "Длительная и бесконечная эволюция привела к тому, что животные демонстрируют удивительные способности", - сказал Ву. Если бы мы использовали всю нашу осторожность для наблюдения за ними, мы могли бы собрать целый спектр вдохновленных биологией парадигм дизайна для будущих роботизированных систем". Например, вдохновившись поведением хобота слона, мы могли бы представить более гибкого континуального робота, способного удовлетворить потребности взаимодействия в средах с различной кривизной". В будущем континуальный робот, созданный командой исследователей, может помочь автоматизировать больше реальных задач в неструктурированных средах, которые трудно или невозможно решить с помощью роботов с жесткой структурой суставов. Благодаря своей уникальной конструкции робот может одновременно выполнять различные функции за счет установки различных концевых эффекторов, таких как захваты и датчики. "Теперь мы хотели бы разработать интеллектуальные стратегии регулирования жесткости, с помощью которых можно еще больше расширить возможности континуальных роботов в исследовании непредсказуемых сценариев в реальном времени", - добавил Ву. "Например, для изготовления пружинных элементов будут использованы некоторые современные материалы, такие как сплав с памятью формы (SMA) и диэлектрический эластомер (DE)". | |
| Просмотров: 371 | |